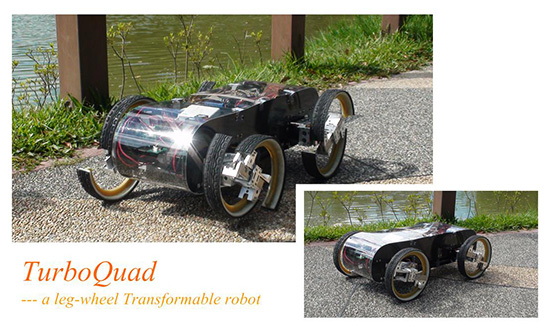
| TurboQuad is a successor of the Quattroped. Our aim was to develop a mobile leg-wheel transformable robot with smooth transitions between wheeled mode, which is suitable for quick and smooth movement on flat terrain, and legged mode, which can stably negotiate uneven terrain. With the novel transformation mechanism and model-based control strategies aided by sensor feedback, TurboQuad can smoothly perform fast leg-wheel transformation and utilize multiple bio-inspired gaits to adapt to varying terrain smoothness efficiently.
TurboQuad 為一輪腳複合型機器人,可根據需求在行進間作平滑的模式切換,使用輪模式可以有效率的在平坦地形上快速移動;使用腳模式則可使用不同仿生步態以克服地形障礙。該平台以物理模型佐以感測器回授作為控制架構,運用特殊設計之變型機構,TurboQuad可以執行快速的輪腳變換,並有效率的在不同地形上移動。
Watch movies (觀看影片) |
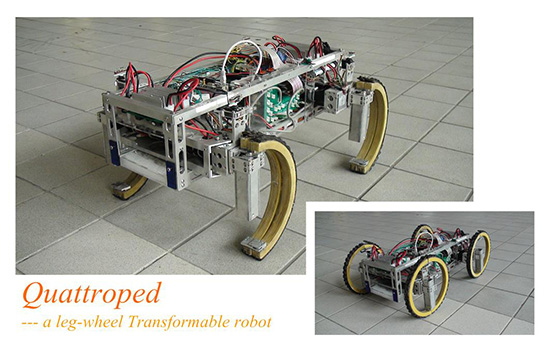
Quattroped is a 4-leg/4-wheel transformable mobile robot. In contrast to most hybrid platforms which have separate mechanisms and actuators for wheels and legs, this robot is implemented with a unique transformation mechanism which directly switches the morphology of the driving mechanism between the wheels (i.e. a full circle) and a 2 degree-of-freedom leg (i.e. combining two half-circles as a leg), so the same system of actuation power can be efficiently utilized in both wheeled and legged modes. Taking advantage of the leg-wheel combination, the robot is capable of performing different behaviors, including wheeled driving, step and bar crossing, irregular terrain passing, stair climbing, etc.
Watch movies (觀看影片) |