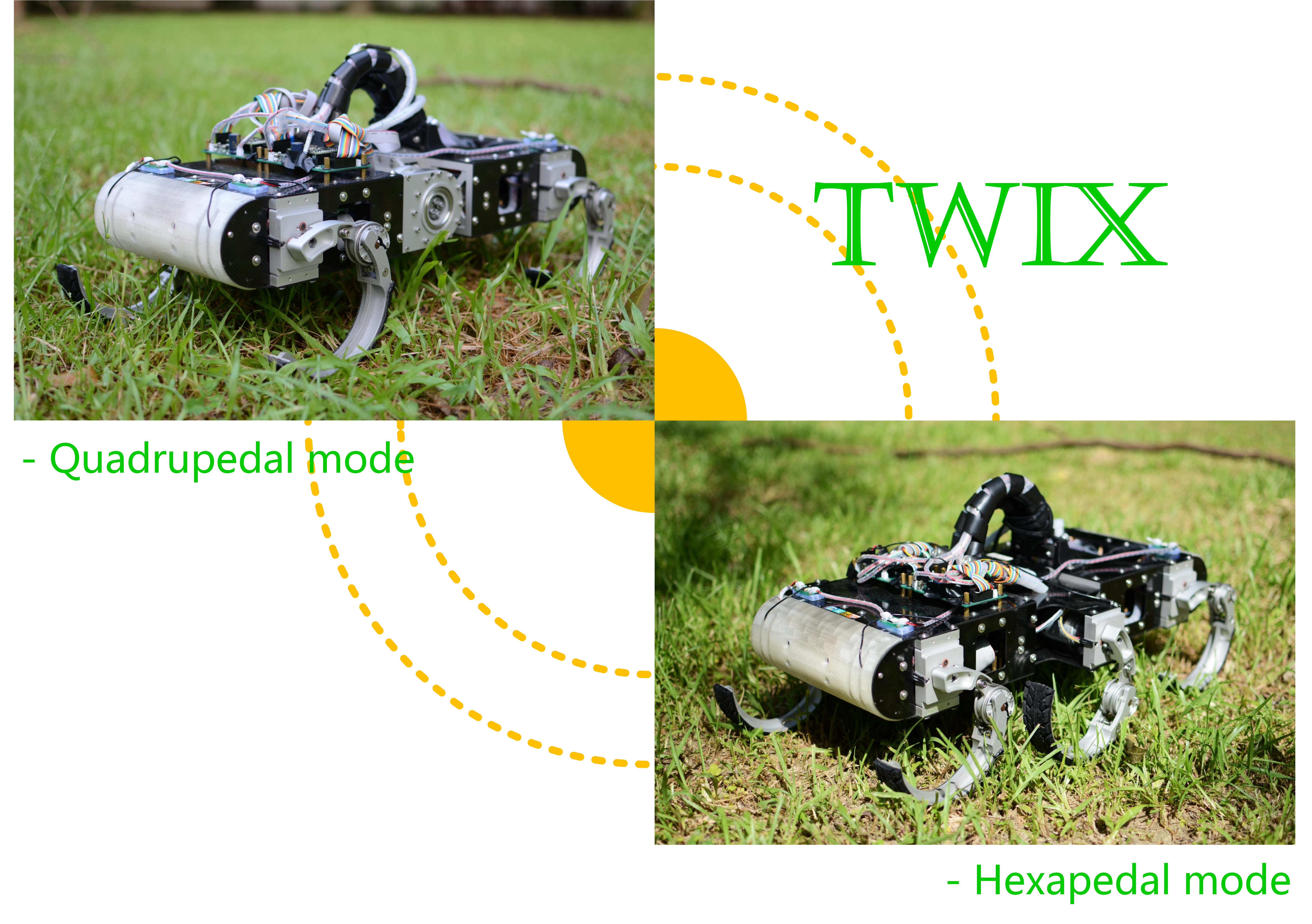
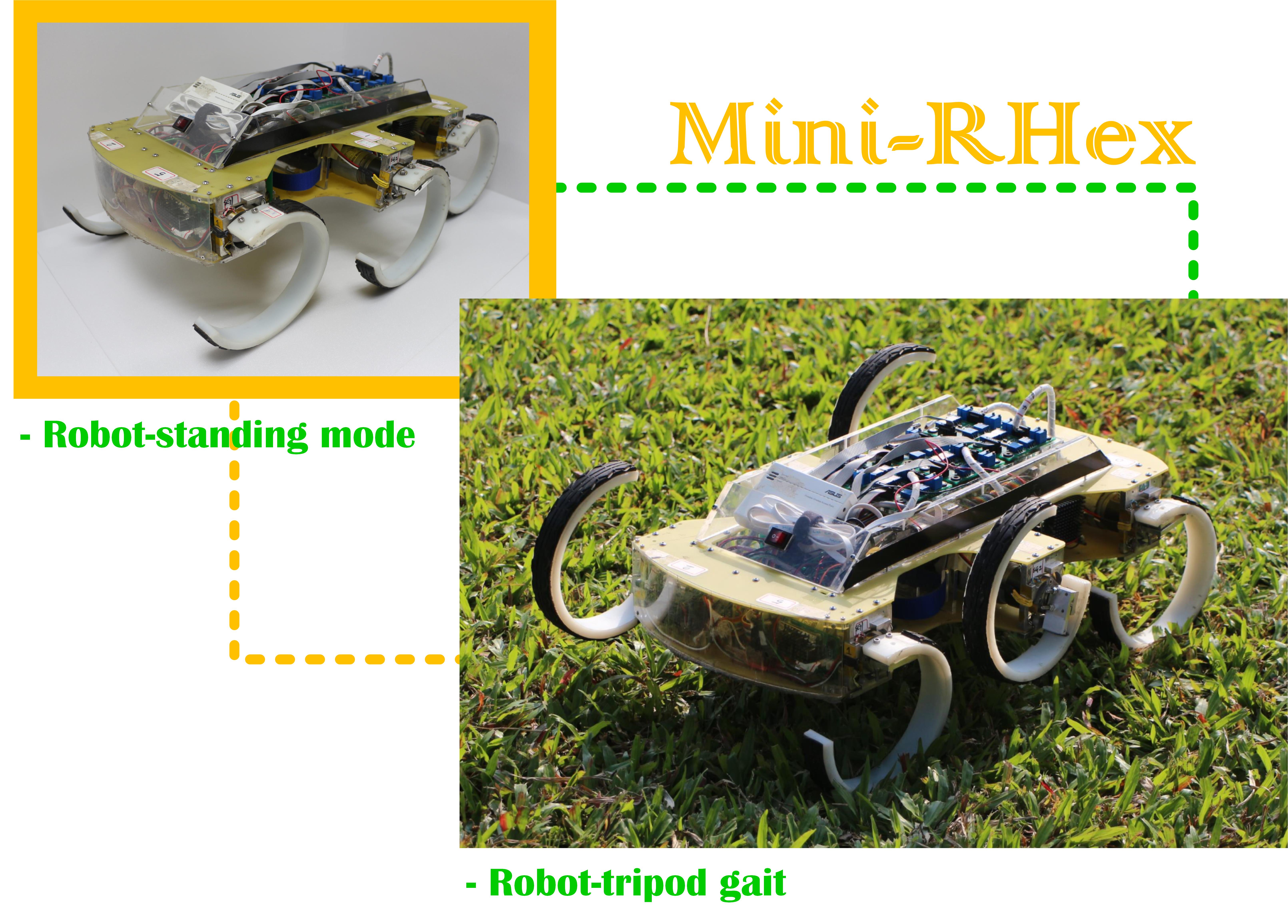
In biology, hexapods can walk stably in complicated terrain with tripod gait, and quadrupeds (cheetah in particular) stretch and contract their waist to run faster. These ideas are implemented on the modular robot, TWIX. TWIX is a special RHex-style robot which can switch between two modes, the hexapedal mode and the quadrupedal mode. Switching can be easily achieved because of the modular design. In the study of dynamic locomotion, TWIX is operated to approach two kinds of problems:
(1) model-based hexapod and quadruped running behaviors
(2) the effect of the waist on running behaviors
生物界中,六足動物可以三點著地的tripod步態穩定行走於複雜地形中,而四足動物(特別是獵豹)則可藉由腰部之伸展收縮,使其跑動更加快速。TWIX機器人即是利用這些生物之啟發所設計的。TWIX是一臺RHex型式之機器人,可以在六足模式與四足模式間切換,其模組化的設計使模式間的切換十分容易。 在動態運動的研究中,TWIX用以探討兩種動態問題:
(1)六足與四足以模型為基礎的跑步行為
(2)腰部對跑步行為之影響 |